


Robot Competitions Kick Innovation In Cognitive Systems and Robotics
Robot Competitions Kick Innovation In Cognitive Systems and Robotics
This Challenge is looking for innovative industrial robots that can help businesses meet increasing demand from their customers. Set in the RoCKIn & RoLLIn factory, a robot will assist with the assembly of a drive axel - one component of the robot itself and therefore a step towards self- replicating robots. Tasks include locating, transporting and assembling necessary parts, checking their quality and prepping them for other machines and workers. The robots will be working interactively as personal mobile assistants in a highly flexible and continuously changing production line.
Below you will find a summary of the tasks, functionalities, platform and benchmarking. Further details on these items can be found in the RoCKIn@Work Rulebook + Nutshell document.
All necessary resources for participants can be found on the RoCKIn Wiki and the RoCKIn GitHub repository.
Assembly-aid trays, bearing boxes and bearings are identified, transported to the relevant rig and fitted together with the help of another machine.

Cover plates coming along a conveyer belt are individually inspected using a quality control camera and sorted, with those in need of drilling being taken to the relevant rig and placed ready for another machine to perform the drilling.

After taking verbal instruction from a human worker, the robot goes around the various Workstations in the arena and collects a machined cover plate, pre-assembled bearing box, and motor with gearbox and encoder. The robot then delivers this box to a human worker for them to finish assembling the drive axel. Throughout this process, robots must report and/or solve errors such as storage areas being occupied by other robots and parts being on the wrong shelf.

The objective of this benchmark is to assess the capabilities of a robot in processing sensor data in order to extract information about observed objects from a given list. It requires the robot to detect the objects presence, estimate their class, identity and location.
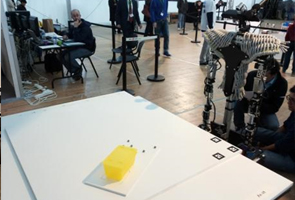
The robot must be capable of controlling the manipulator motion based on its own visual perception.
This functional benchmark will test the team's ability to move their robot's manipulator in a well-controlled manner, following a spline on a given trajectory as accurately as possible.

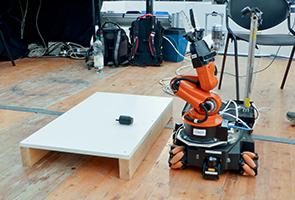
Tasks must be completed using a fully autonomous platform with mobile manipulation capabilities such as the KUKA youBot. Modifications to the platform are allowed but not to the environment or networked devices installed in the environment.
Possible mobile manipulators include:
Possible arms that could be mounted to a mobile bases include:

Benchmarking in RoCKIn has been designed so as to minimise subjective evaluations and to allow for the quality of sub-system components to be recognised as well as success in performing the overall task. Though the careful design and revision of the challenge rules we hope to allow for the comparison of performances across years.
Tasks will be benchmarked against whether they successfully complete the required actions (such as understanding commands, correctly operating and/or identifying objects and devices etc.) and how effectively they do so, with penalties being given for actions such as bumping into Granny Annie or furniture for RoCKIn@Home. Penalties or disqualification in RoCKIn@Work will be given for actions such as damaging objects or the testbed.


Funded by the EU